
Le robot Kurt3D sera prochainement capable d’identifier spontanément à quoi peut servir un objet et l’utiliser pour réaliser une tâche, sans qu’il n’ait été programmé au préalable pour son utilisation.
Robot intuitif
 L’ambition du projet européen MACS (Multi-sensory Autonomous Cognitive Systems) est de permettre aux robots de comprendre automatiquement l’utilisation d’un objet qui leur est présenté. Son système permettra à des machines d’identifier les principales caractéristiques d’un objet pour pouvoir ensuite s’en servir pour résoudre une tâche, même sans programmation particulière.
L’ambition du projet européen MACS (Multi-sensory Autonomous Cognitive Systems) est de permettre aux robots de comprendre automatiquement l’utilisation d’un objet qui leur est présenté. Son système permettra à des machines d’identifier les principales caractéristiques d’un objet pour pouvoir ensuite s’en servir pour résoudre une tâche, même sans programmation particulière.
Le dispositif s’appuie sur la théorie de l’affordance (ou potentialité). Une théorie cognitive qui s’intéresse à la capacité d’une entité à comprendre de manière intuitive le fonctionnement d’un objet. Et à imaginer ensuite les intéractions possibles avec son environnement.
Dans le domaine de la robotique, cette théorie permet à la machine d’identifier les principales caractéristiques d’un objet et de les rapprocher d’un usage. En clair : le robot, mis en face d’une chaise, ne se contentera pas de reconnaître cette dernière, mais sera capable de déterminer qu’elle est faite pour s’asseoir.
Plus d’informations, photos et vidéos sur Kurt3D le robot qui pressent l’utilité d’un objet dans la suite …
Manipuler son environnement
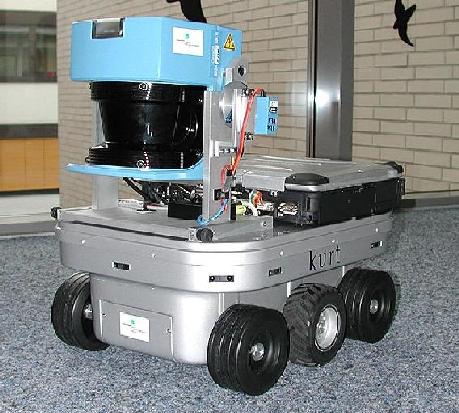
Ce n’est en effet pas la chaise en tant que telle qu’il perçoit, mais un objet de surface plane et à la structure rigide dont il sait qu’il permet de s’asseoir. Selon les chercheurs, une plate-forme robotisée qui intègre ce principe est capable de réaliser un nombre plus important de connexions entre les objets que si elle utilise des systèmes de reconnaissance. Le dispositif d’affordance a été combiné à plusieurs autres solutions techniques destinées à permettre au robot, baptisé Kurt3D, de progresser de manière autonome : modules de perception de l’environnement, programmateurs, solutions d’apprentissage…
Le but étant, à terme, de le rendre capable de chercher par lui-même les solutions permettant de résoudre une tâche. Pour vérifier l’efficacité du système, les responsables du projet ont d’abord effectué des tests virtuels via un logiciel de simulation. Des essais ont ensuite été effectués sur le véritable robot Kurt3D.
Une capacité de réflexion encore balbutiante
Le robot serait parvenu à identifier quels étaient les objets dont il pouvait s’emparer, et les aurait placé à des endroits où ils n’encombraient pas le passage. Kurt3D aurait même été capable d’une certaine capacité d’improvisation, en réussissant à s’orienter dans un environnement inconnu. Le projet, sur lequel les équipes travaillent depuis 2004, est cependant encore loin de la phase de commercialisation.
« Nous en sommes encore au premier stade de nos recherches« , précise ainsi Erich Rome, coordinateur de MACS. « D’autres initiatives s’intéressent à cette problématique. Mais nous sommes les seuls à avoir introduit le concept d’affordance dans notre architecture« , ajoute-t-il. Le projet COSPAL, par exemple, combine deux technologies, l’Intelligence Artificielle et les Réseaux Neuronaux Artificiels, pour permettre à un robot de progresser seul, sans aide humaine, et d’apprendre lui aussi à utiliser de manière autonome les objets qui l’entourent.
Vidéo de Kurt3D le robot qui pressent l’utilité d’un objet :
Lien vers le site web officiel du Robot Kurt3D.
 Si vous copiez l'article ou que vous vous en inspirez, merci de citer vos sources.
Si vous copiez l'article ou que vous vous en inspirez, merci de citer vos sources.










{kind=link}